Tech Elements
Радиоэлектроника и телекоммуникации
Имитационное моделирование системы
Соберем модель скорректированной системы в системе моделирования Simulink. На рисунке 4.1 показана модель Simulink, составленная по структурной схеме рисунка 3.5.

Рисунок 4.1 - Модель Simulink
Для начала определим прямые показатели системы для краевых случаев и величину статической ошибки. Для этого следует на главный вход системы подать единичное входное воздействие. Так как обратная связь не единичная, с точки зрения системы, единичным сигналом является величина задающего воздействия Uз = 10 В.
В таблицу 4.1 сведены все интересующие нас значения. На рисунках 4.2 и 4.3 показан выход системы соответственно для минимума нагрузки и максимума нагрузки.
Таблица 4.1 - Отработка единичного входного воздействия
|
Случай |
Выход системы |
Прямые показатели |
εст% | ||
|
С3 макс, м |
С3 уст, м |
σ% |
tр (1,35%), с | ||
|
Минимум |
1,0750 |
0,9994 |
8 |
0,41 |
0,06 |
|
Максимум |
1,1566 |
0,9994 |
16 |
0,38 | |

Рисунок 4.2 - Переходная характеристика при минимуме нагрузки

Рисунок 4.3 - Переходная характеристика при максимуме нагрузки
Очевидно, что система не выходит по прямым показателям за пределы допустимых значений. Отметим, что ненулевая статическая ошибка в данной модели полностью обусловлена возмущением и примерно совпадает с теоретическим значением.
Затем следует проверить как система отрабатывает программную траекторию. Ниже представлен код программируемого блока системы Simulink.

На рисунке 4.4 показана система после ввода программируемого блока, на рисунках 4.5 и 4.6 показан выход системы при минимуме и при максимуме нагрузки и на рисунках 4.7 и 4.8 показана ошибка системы, переведенная в относительные единицы при минимуме и при максимуме нагрузки.

Рисунок 4.4 - Модель Simulink с введенным программируемым блоком
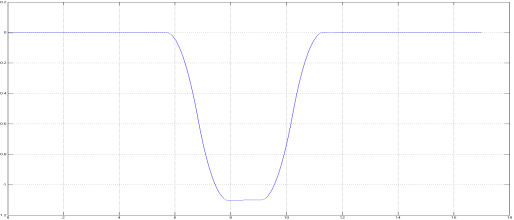
Рисунок 4.5 - Выход системы при минимуме нагрузки
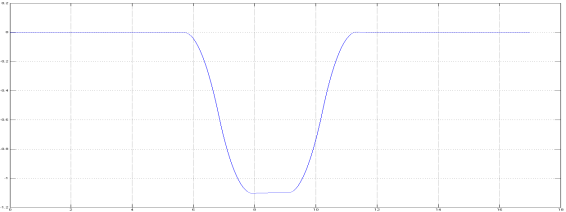
Рисунок 4.6 - Выход системы при максимуме нагрузки

Рисунок 4.7 - Ошибка системы в относительных единицах при минимуме нагрузки

Рисунок 4.8 - Ошибка системы в относительных единицах при максимуме нагрузки
Внешне рисунки 4.5 и 4.6 достаточно хорошо повторяют рисунок 2.2, что воплощает основной замысел. По рисункам 4.7 и 4.8 можно определить максимальную динамическую ошибку системы, для чего необходимо засечь максимальный всплеск. По рисункам 4.7 и 4.8 максимальная динамическая ошибка системы равна
Другие стьтьи в тему
Радиолокатор. Радиолокационные станции
В 1887 году немецкий физик Генрих Герц начал эксперименты, в ходе которых
он открыл существование электромагнитных волн, предсказанных теорией Джеймса
Максвелла. Герц научился генерировать и улавливать электромагнитные радиоволны
и обнаружил, что они по-разному поглощаются и отражаю ...
Разработка измерительного преобразователя
Современная экономика характеризуется широкой интеграцией передовых
технологий, в том числе и в области промышленной электроники.
Мировая тенденция - тесное сотрудничество разработчиков элементной базы,
электронных систем и аппаратуры, т. е. объединение научно-технических
потенциал ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации