Tech Elements
Радиоэлектроника и телекоммуникации
Расчет силовых компонентов привода механизма подъемаопускания груза промышленного робота
Эффективность средств производства, которыми располагает человеческое общество, в значительной степени определяется совершенством способов получения энергии, необходимой для выполнения механической работы в производственных процессах. Производственные механизмы, без которых нельзя в настоящее время представить ни одно производство, прошли длительный путь своего развития, прежде чем принять вид современного автоматизированного электропривода, приводящего в движение бесчисленное множество рабочих машин и механизмов в промышленности, транспорте, в сельском хозяйстве и в бытовой технике и управляющего их технологическими процессами.
Современный автоматизированный электропривод представляет собой сложную электромеханическую систему, предназначенную для приведения в движение рабочего органа машины и управления технологическим процессом. Он состоит из трех частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, предающей механическую энергию рабочему органу машины, и системы управления (регулирования), обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом.
Многообразие производственных процессов обуславливает различные виды и характеры движения рабочих органов машины, а, следовательно, и электроприводов. По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное движение и поступательное реверсивное движение. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций. Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов. Развитие автоматизированного электропривода ведет к совершенствованию конструкций машин, к коренным изменениям технологических процессов, к дальнейшему прогрессу во всех отраслях народного хозяйства, поэтому теория автоматизированного электропривода - техническая наука, изучающая общие свойства электромеханических систем, законы управления их движением и способы синтеза таких систем по заданным показателям, - имеет важнейшие практическое значение.
Необходимо произвести расчет электрического привода и его системы регулирования, предназначенного для программного управления линейным перемещением механизма подъема промышленного робота. Механизм подъема осуществляет поступательное перемещение зажатого в захватывающем механизме груза, посредством зубчато-реечной передачи, движимой двигателем постоянного тока (далее ДПТ). На рисунке 1.1 показан механизм подъема.
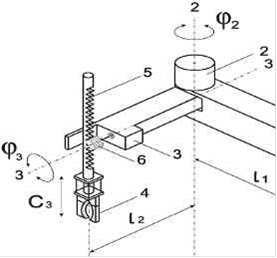
Рисунок 1.1 - Механизм подъема промышленного робота
На рисунке 1.1 цифрами показана ось вращения 3-3 ДПТ механизма подъема, механизм захвата 4, рейка 5, зубчатая шестерня 6. Перемещение зажатого груза осуществляется по некоторому закону C3(t).
Отметим, что данный промышленный робот работает по некоторой программе, состоящей из нескольких составляющих ее этапов. Подъем и опускание груза это один из этапов его программы. Робот выполняет программу периодически, и каждый такой период принято называть циклом. Цикл характеризуется своей продолжительностью Tц. В данной постановке задачи нам не требуется знать весь цикл, а необходимо лишь рассмотреть ту часть, которая приходится на этапы подъема и опускания груза. В соответствии с режимами работы привода механизма подъема и опускания в цикле, необходимо выбрать компоненты привода и подобрать параметры так, чтобы удовлетворить требованиям множества критериев, которые будут рассмотрены ниже в разных частях данной работы, а также исходным данным.
Исходные данные, необходимые для расчета электрического привода механизма подъема и опускания, приведены в таблице 1.1.
Таблица 1.1 - Исходные данные
|
Tц, c |
C3m, м |
Масса |
η |
ipn, рад/м |
||
|
mp, кг |
mmin, кг |
mmax, кг |
||||
|
17 |
1,1 |
9 |
15 |
45 |
0,65 |
1,2 |
|
ky |
Tm, с |
eст% |
eд% |
s% |
tп, c |
Вариант |
|
100 |
0,0035 |
1,35 |
1,02 |
18 |
1,1 |
51 |
В таблице 1.1 приняты следующие условные обозначения:
- C3m [м] - максимальное значение траектории (максимальная высота опускания / подъема груза);
- mp [кг] - масса рейки;
- mmin, mmax [кг] - пределы массы поднимаемого / опускаемого груза;
- h - минимальный КПД редуктора;
- ipn - передаточное отношение зубчато-реечной передачи;
- ky - коэффициент усилителя мощности;
- Tm [с] - постоянная времени усилителя мощности;
- eст% - относительная статическая ошибка системы регулирования;
- eд% - относительная динамическая ошибка системы регулирования;
- s% - максимальное перерегулирование;
- tп [c] - максимальное время переходного процесса системы регулирования.
К исходным данным причисляется и закон С3(t), который может быть описан системой алгебраических уравнений. В данной постановке задачи рабочий цикл данного робота известен и представлен в виде двух аппроксимаций. На рисунке 1.2 показаны моменты времени, в которые работает механизм подъема и опускания груза, первого варианта рабочего цикла, а на рисунке 1.3 - второго.

Рисунок 1.2 - Первый вариант рабочего цикла

Рисунок 1.3 - Второй вариант рабочего цикла
График закона С3(t) рисунка 1.2, который принято называть траекторией, строится через следующую систему алгебраических уравнений
![]()
![]()
![]() (1.1)
(1.1)
![]()
![]()
![]()
Система уравнений траектории рисунка 1.3
![]()
![]()
![]() (1.2)
(1.2)
![]()
![]()
Отметим, что помимо самой траектории также изображены первая и вторая производные траектории. В совокупности они дают исчерпывающее представление о режимах работы электропривода в определенные моменты времени. Следующим необходимым шагом является определение параметров систем алгебраических уравнений (1.1) и (1.2).
Также отметим, что в данной постановке задачи представленные траектории являются возможными вариантами одной и той же программы робота. Впоследствии на одном из этих вариантов придется остановиться.
- Определение параметров рабочих траекторий
- Расчет рабочей нагрузки
- Выбор двигателей и редукторов
- Проверка пары двигатель-редуктор на нагрев
- Выбор рабочей траектории
- Проектирование системы регулирования
- Математическая модель двигателя постоянного тока
- Датчик линейных перемещений
- Синтез регулятора
- Проверка ошибок скорректированной системы
- Имитационное моделирование системы
Другие стьтьи в тему
Разработка системы подводного гидроакустического позиционирования нефтедобывающего комплекса
В
последние годы большим спросом стали пользоваться подводные работы с
использованием систем подводного гидроакустического позиционирования (ГСП).
Данные системы широко применяются при поиске углеводородов, находящихся на
морском дне, укладке подводных трубопроводов, обследовании под ...
Разработка микропроцессорной системы управления РТК на базе вертикально–фрезерного станка 6Р13Ф3-37
Автоматизация
технологических процессов является одним из эффективных путей повышения
производительности труда на предприятии.
Автоматизация
осуществляется посредством автоматизированных роботизированных технологических
комплексов (РТК).
Роботизированный
технологический компле ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации